外科手術における画像診断は、フィルムからモニター、そして空間表示へと進化を遂げつつあります。CT・MRIの三次元データをXR空間に表示し、術前シミュレーションから術中アシスト、教育までを一貫して活用する取り組みが、肝胆膵外科・呼吸器外科の領域で急速に広がっています。
本レポートでは、第126回日本外科学会定期学術集会 イブニングセミナー11「立体空間を意識した低侵襲肝胆膵・肺切除:XR画像支援の最前線」の講演内容をまとめ、XR画像支援の現在地を整理します。
イブニングセミナー 開催概要
本セミナーは、第126回日本外科学会定期学術集会(2026年4月23日、札幌市民交流プラザ)において、「立体空間を意識した低侵襲肝胆膵・肺切除:XR画像支援の最前線」をテーマに開催されました。
座長:長谷川 潔 先生(東京大学大学院医学系研究科 臓器病態外科学 肝胆膵外科、人工臓器・移植外科)のもと、XR技術の基盤解説から、肝臓・膵臓・肺それぞれの領域における臨床応用、ロボット手術との統合まで、3名の医師による講演が行われました。

XR技術が変える手術支援の全体像(講演1:杉本 真樹 先生)
杉本先生からは、XR技術の基盤となる仕組みとHoloeyesの臨床応用の全体像について、多領域にわたる導入実績と学術エビデンスを交えた解説が行われました。
カーナビのように手術をアシストする
手術は短時間で的確な判断と正確な操作が求められます。XR技術を用いることで、カーナビのように術中に患者固有の解剖を立体的に把握しながら手術を進めることが可能になります。滅菌術野上で自由に操作できる点も大きなメリットであり、手術時間の短縮、出血・合併症の予防、術者のストレス軽減につながると期待されています。
Holoeyesの仕組みと技術基盤
VR・AR・MRを総称するXR技術は、Meta Quest 3やApple Vision Proといったヘッドマウントディスプレイの普及により、一般にも身近なものとなりました。Holoeyesは、CT・MRIから作成された3Dポリゴンシステムを専用のウェブサイトにアップロードすると、約5分でXRアプリケーションおよびヘッドマウントディスプレイに同期表示されるシステムです。アップロードされたデータは、患者同意のもと個人情報を除去した状態でクラウド管理され、24時間365日自動処理されています。
あらゆる外科領域への臨床展開
HoloeyesはクラスII医療機器として、術前カンファレンス、患者説明、教育、術中アシストに活用されています。肺がん、胃がん、大腸がん、食道がん、肝がん、胆道がん、膵臓がん、前立腺がん、腎臓がん、乳がん、子宮がんなど、あらゆるがん手術で導入されているほか、整形外科(脊椎・関節置換術)、ERCP、超音波内視鏡下ステント留置、ラジオ波焼灼術、心臓外科、脳外科、カテーテル治療、麻酔科、形成外科にまで広がっています。
学術的エビデンスと社会的評価
医学論文は英文70件・日本語157件が掲載され、国際学会賞23件・国内学会賞14件を受賞しています。文科省科研費は基盤研究22件(継続中9件)、研究スタート支援3件が採択されており、民間助成金17件、大学関連研究助成金6件も獲得しています。導入実績のある施設は大学病院を中心に全国約70施設以上に及び、北海道から沖縄まで各地域の代理店と販売網を形成しています。経産省・総務省・東京都・JETROなどからも評価を受けています。
メタバース空間での教育と遠隔支援
熟練外科医が仮想空間でアバターとなり、若手医師への遠隔カンファレンスや技術伝承を行う取り組みも進展しています。画像診断の歴史はフィルムからPC画面へ、そして空間表示へと進化しており、杉本先生はXR技術を「個人にあるといい技術ではなく、社会にないと困る技術になりつつある」と締めくくりました。
ロボット肝切除とXR — 空間把握・俯瞰性・共通認識の新時代(講演2:齋藤 裕 先生)
齋藤先生からは、肝臓手術における画像支援の歴史を振り返りつつ、ロボット肝切除におけるXRの臨床的価値と、「XRサージョン」という新たな役割の提案が行われました。

肝臓手術における画像支援の歴史
画像支援の歴史は、幕内先生の術中エコー区域同定(1980年代)に始まり、2000年代にはFujifilm VINCENTやSynapse、バーチャル肝切除3Dシミュレーションなどが発展しました。2020年代に入るとICG蛍光法がナビゲーションのゴールデンスタンダードとなりつつある中、XRがさらなる進化をもたらしています。
XRが実現する「仮想と現実の行き来」
肝臓は表面からでは内部構造が見えない臓器であり、術者は常に術前画像と術中所見を頭の中で照合しながら手術を進めています。XRを用いることで、この「仮想と現実の行き来」が格段に容易になります。目の前に患者の立体模型があり、自分で回転させながら術前にシミュレーションし、その同じモデルを術中アシストとしても参照できることで、イメージの統合にかかる時間は大幅に短縮されます。かつて3D画像の作成に3〜4時間を要していたものが、わずか5分で完了する点もXR活用の障壁を大きく下げています。
開腹手術でのXR活用事例
解剖学的破格を伴う系統的肝切除において、XRモデルを術中参照で用いて手術を行った事例が紹介されました。指でモデルを操作して切除の深さや方向を確認し、グリソン鞘の走行を術中に再確認することで、安全な手術遂行に寄与しています。また、胆管の嚢胞性疾患における温存手術でも、XRによる胆管走行の可視化が術前カンファレンスおよび術中の意思決定に活用されました。
ロボット肝切除への応用 — 限られた視野を補完する
徳島大学では腹腔鏡およびロボットを合わせて計200例以上の連続症例を経験し、手術関連死亡率は0%を達成しています。2023年からロボット肝切除を開始し約70例を経験、hinotoriTMでも6例の実績があります。ロボット手術では拡大視野で操作する反面、「離脱方向は本当に合っているか」「出てきた脈管は本幹ではないか」「腫瘍はどこにあったか」といった俯瞰的な空間把握が課題となります。XRコンソール内タッチパネルアシストおよびXR表示により、この課題の補完が図られています。
「XRサージョン」という新しい役割
齋藤先生の教室では、コンソールサージョン・助手に加え、「XRサージョン」という第三の役割を設けています。XRサージョンはゴーグルを装着し、リアルタイムで3Dモデルを参照しながら、脈管同定や離断方向について音声でコンソールと助手にフィードバックを行います。さらに、医学部学生やレジデントにもゴーグルを装着させ、術中のコミュニケーションと立体画像を同時に体験させることで、手術教育にも革新をもたらしています。
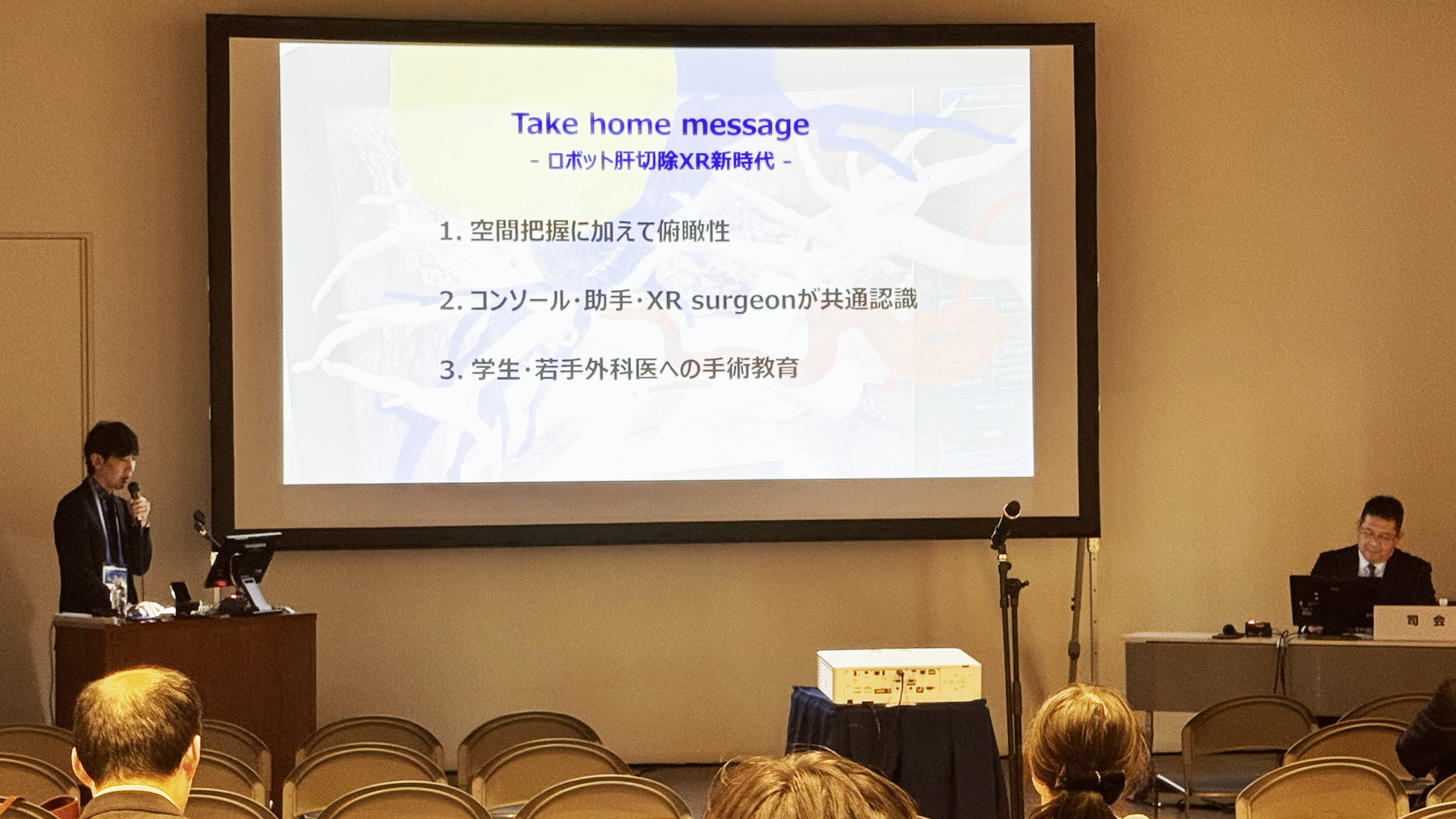
ロボット肝切除×XRの3つのメリット
齋藤先生は、ロボット肝切除におけるXRの価値を3点に集約しました。第一に空間把握の向上(限られたロボット視野をXRの俯瞰的表示で補完)、第二に俯瞰性と共通認識(コンソール・助手・XRサージョンが同一画像を共有)、第三に若手外科医・学生の手術教育です。
呼吸器外科におけるXR技術の応用 ― マーキングから拡大手術まで(講演3:田根 慎也 先生)
田根先生からは、呼吸器外科領域におけるXR技術の応用として、術中マーキングの新手法、Apple Vision Proとの親和性、そして稀少な拡大手術への教育的活用が報告されました。
XRを用いた新しい術中マーキング法
肺の縮小手術(区域切除)では、切除後に腫瘍を確実に含んでいること、かつ十分なマージンを確保することが重要です。従来はCTガイド下マーキングや気管支鏡下マーキングなど術前に手間をかけていましたが、XRを活用することで、胸腔鏡手術中にリアルタイムでマーキングが可能になります。3Dホログラムで腫瘍位置を確認しながら電気メスでマーキングを行う手法が紹介されました。
臨床研究での検証結果
20例の臨床研究の結果、18例でマーキングが成功(成功率90%)し、XRで設定したマージンと病理学的マージン(パソロジカルマージン)の一致率も良好でした。全例で1cm以上の切除マージンが確保されています。無侵襲かつ術中に完結できるマーキング法として、従来のCTガイド下穿刺等に代わる選択肢となる可能性が示されました。
Apple Vision Proとの親和性
Apple Vision Proの高性能GPUにより、ボリュームレンダリングを含む3Dホログラムがストレスなく動作することが確認されました。ベッドサイドサージョンやXRサージョンがApple Vision Proを装着し、3Dホログラムを参照しながらコンソールサージョンの手術をアシストする運用が報告されました。
拡大手術への応用 ― 稀少術式の教育的価値
ロボット手術の普及により開胸手術の機会が減少する中、肺尖部腫瘍(パンコースト腫瘍)に対するGrunenwald/Dartevelle approachのような拡大手術は若手医師が経験する機会が限られています。鎖骨下動脈・椎骨動脈・腕神経叢といった危険構造物が近接する術式において、XRによる3Dホログラムを用いた術前シミュレーションおよび術中の解剖確認が、安全性と教育の両面で有用であることが示されました。
ディスカッション ― XR画像はいつ、どう参照するのか
講演後の質疑応答では、XR画像を参照するタイミングについて議論が行われました。齋藤先生からは、ロボット手術中の5分間のインターミッション(離断中断時)にコンソールを離れてXRモデルを確認する運用や、術中エコーのタイミングでXRを参照する方法が紹介されました。
また、肺手術特有の課題として、虚脱肺と膨張肺の形態差によるXRモデルとのズレについても議論され、ハーフインフレート状態でのマーキングや、術者自身の頭の中での補正が現時点でのアプローチであることが共有されました。理想的にはリアルタイムでロボットのコンソールモニター内にXR画像が統合表示されるロボットの開発が望まれるという意見で一致し、「欲しいと言い続けることが大事」という声も上がりました。
まとめ|XR画像支援は「あるといい」から「ないと困る」へ
本セミナーを通じて明らかになったのは、XR画像支援が単なる先端技術のデモンストレーションではなく、肝胆膵外科・呼吸器外科の日常臨床に組み込まれつつある実用的なツールであるという事実です。空間把握の向上、チーム内の共通認識の形成、そして次世代外科医への教育——XR技術は手術の質を多面的に底上げする可能性を秘めています。
杉本先生が述べたように、XR技術は「個人にあるといい技術ではなく、社会にないと困る技術」になりつつあります。
