消化器外科領域において、鏡視下手術やロボット支援下手術の普及は目覚ましいものがあります。しかし、触覚の欠如やロボット特有の固定された視野は、複雑な脈管解剖を有する肝胆膵領域において、術者に高度な空間認識力と慎重な術前画像評価を要求します。CT画像から構築した3D立体臓器モデルをVR/AR(XR)空間で直感的に提示し、手術をアシストする「Holoeyes MD」は、こうした課題に対して臨床実装が進んでいます。
本レポートでは、2026年5月22日に奈良県コンベンションセンターで開催された、第38回日本肝胆膵外科学会学術集会 イブニングセミナー4「腹腔鏡・ロボット時代の肝胆膵外科戦略:精密解剖を再現する術野展開とXR手術アシストの実装価値」の講演内容を要約し、肝胆膵外科におけるXR技術の現在地と具体的な臨床・教育価値を整理します。
※ 本レポートは、第38回日本肝胆膵外科学会学術集会 イブニングセミナー4における各演者の講演内容を要約・報告するものであり、個々の臨床経験や見解は各演者に帰属します。Holoeyes株式会社としての公式見解・効能を示すものではありません。
イブニングセミナー4 開催概要
第38回日本肝胆膵外科学会学術集会とHoloeyes株式会社の共催として開催されました。若手外科医の修練から上級医の指導、さらに他領域から転身した熟練医の修練にいたるまで、XR技術がもたらす「精密解剖の可視化」の実装価値について、3名の演者より臨床知見が発表されました。
第38回日本肝胆膵外科学会学術集会・Holoeyes株式会社共催
イブニングセミナー4 腹腔鏡・ロボット時代の肝胆膵外科戦略:精密解剖を再現する術野展開とXR手術アシストの実装価値
日時:2026年5月22日(金)15:20〜16:00
会場:奈良県コンベンションセンター 2F 会議室202(第8会場)
司会:
井上 陽介(帝京大学医学部 外科学講座 肝胆膵外科)
杉本 真樹(帝京大学冲永総合研究所 Innovation Lab / 帝京大学医学部 外科学講座 肝胆膵外科)
演者:
講演1:神人 悠(帝京大学医学部 外科学講座 肝胆膵外科)
講演2:脊山 泰治(がん・感染症センター都立駒込病院 外科(肝胆膵))
講演3:笠原 健大(東京医科大学 消化器・小児外科学分野)
ロボット膵頭十二指腸切除におけるMST法とXRアシストの融合(講演1:神人 悠 先生)
2020年の保険収載以降、全国で急速に導入が進むロボット支援下膵頭十二指腸切除術(ロボットPD)。開腹手術や腹腔鏡手術と異なり、ロボット手術特有の「視野作り」と「臓器展開」の工夫、さらに「触覚の欠如」を補うための正確な術前解剖把握が強く求められます。神人先生は、自身の経験をもとに、XR技術とポート配置を動的に変更する「MST法」を組み合わせた最新の手術戦略を発表しました。
術前3Dモデルによる緻密なシミュレーション
高難度症例へのアプローチ:造影CT画像からOsiriX MD等の3D解析データ(STLファイル)を抽出し、Holoeyes MD上で着色・統合して構築した3D臓器モデルをVRゴーグルに投影する手法が示されました。あわせて、腫瘍が巨大で門脈を強く圧迫し、左右分岐部まで深く入り込んでいる門脈露出困難症例が提示されています。
術前シミュレーション:SMA(上腸間膜動脈)に対する左後方からのアプローチ(Left Posterior Approach)を先行させ、SMAと膵頭部間の剥離、十二指腸球部・GDA(胃十二指腸動脈)・胆管を切離し、門脈全壁を露出した段階で膵切離へ進む戦略を、3Dモデル上でミリ単位で検証した過程が報告されています。
血管処理のタイミング把握:J1A(第一空腸動脈)とIPDA(下膵十二指腸動脈)の共通管、およびGDAを先行処理して流入血を減少し、最も視野確保が難しい「最後のDPA(背側膵動脈)」からの血流をコントロールする手順が、3Dモデルによる動的検証を通じて解説されました。
スコープ位置を動的に変更する「MST法」との相乗効果
ロボット手術の硬性鏡(30度斜視鏡)による視野制限を克服するため、ポート配置を術中に変更してアプローチを最適化するMST法(Multiple Scope Transition)の併用について発表がありました。
Left Position:SMA左側の視野を最適化し、Left Posterior ApproachでのJ1A・IPDA処理、SMA周囲の郭清を安全に行う。
Central Position (Lower):大網、膵頭十二指腸前面の露出、SMV(上腸間膜静脈)前面の剥離を良好な視野で実行。
Central Position (Upper):見下げ視野を作り、肝門部周囲の郭清や8pリンパ節郭清に活用。
Right Position:右下方からの見上げ視野で、膵頭神経叢の剥離やIPDAの処理を完遂。
過去の教訓とXRの有用性
神人先生は、過去に膵体尾部切除においてDPA(背側膵動脈)の走行を見落とし、術中出血から開腹移行を余儀なくされた経験に触れ、以降は全症例で3D血管像を中心としたHoloeyes MDモデルを構築するようになったと語りました。直感的に奥行きや分岐形態を把握した上で、ロボットの拡大視野とMST法を組み合わせることで、術前シミュレーションに沿った安全性の高い切除が遂行できたとのことです。
さらに、自身でVRゴーグルを装着し、3D血管モデルを手で回転・拡大しながら音声を入力して術前プレゼン動画を作成した事例も示されました。動画編集会社への外注と比較してコストと時間を大幅に削減でき、若手外科医の解剖理解トレーニングとしても有用であるとまとめています。
精密解剖の再現とXR手術アシストの実装価値:教育・採用へのインパクト(講演2:脊山 泰治 先生)
杉本真樹先生とともに15年前の「3Dプリンターによる肝臓モデル」の時代から3D画像解析・シミュレーションの進化を共創してきた脊山先生。手に持って確認できた3Dプリントの時代から、腹腔鏡・ロボット手術の普及に伴い「手に持てない手術」へと移行した現代において、XRホログラム技術が果たす役割について講演しました。

最新XRシステムがもたらす3つの臨床価値
ロボット手術では拡大視野を得る一方、局所への近接により「全体の空間把握(全体像)」が難しくなる課題があります。この点について、最新のXR機能が空間把握を補完する有用性が解説されました。
パススルー機能:昔のVRと異なり、ゴーグルを被った状態で現実の術野やスタッフが完全に見えるため、滅菌術野に立ちながら安全に3Dモデルを参照できます。
スライス機能:3D臓器モデルを特定の平面でカットし、CT断面のような2D画像を空間上にリアルタイムで表示。手前からの血管走行と腫瘍の位置関係をシームレスに行き来できます。
複数端末のWi-Fi同期:術者がゴーグル内で見ている立体画像と全く同じ視点を、スマホやタブレットでリアルタイムに共有可能です。
没入型シミュレーションによる手術イメージの共有
中間肝静脈(MHV)および下大静脈(IVC)に近接する3cmの肝腫瘍症例が提示されました。3Dモデルのワイヤーフレーム表示や、仮想の離断面を設定して「肝臓の一部を実際に手でめくって取り外す(Peel-off)」インタラクティブなシミュレーションを実演。離断面に次々と現れる深部の脈管(V6枝、V5枝など)を事前に「体感」することで、術前に強固な空間認識を持ち、術中のスムーズなアプローチに寄与する有用性が報告されています。
教育への革新と「外科医リクルート効果」
都立駒込病院では、初期臨床研修医や見学の医学部学生に対して、積極的にHoloeyes MDを活用した教育を実施しています。「若い人ほど立体空間への適応が早く、感動とインパクトが大きい」と脊山先生は語ります。
リクルート実績:外科マッチングの志望順位(第一希望)として同院を指名する学生が増加し、外科の競争率が3倍に上昇。大学病院を含めた全国の外科リクルートランキングで「全国7位」を達成しました。コメディカルや若手医師との術前コミュニケーションの効率化に寄与し、スケッチ等で培われていた「空間把握の感覚」の習得期間を短縮する「手軽で有用な教育ツール」であると総括しています。
大腸外科医から肝胆膵外科医への二刀流転身と、XRによるSMA/SMV周囲精密解剖の克服(講演3:笠原 健大 先生)
笠原先生は、大腸外科医としてロボット手術約300例の豊富な実績を持つ熟練外科医です。2026年2月に東京医科大学の永川教授に誘われ、月曜と金曜は「肝胆膵外科」、水曜は「大腸外科」という、大学医局の枠を超えた異例の「二刀流」として肝胆膵外科へ参入した経緯が語られました。大腸外科と全く異なる「肝胆膵の解剖」を克服するプロセスにおいて、XR技術がどのように寄与したかが本講演の主題です。
大腸外科医が直面する「肝胆膵解剖の壁」
ロボット支援下膵頭十二指腸切除術(ロボットPD)のラーニングカーブは一般に50例(大腸ロボットは20〜30例)とされ、難易度は格段に高いとされています。
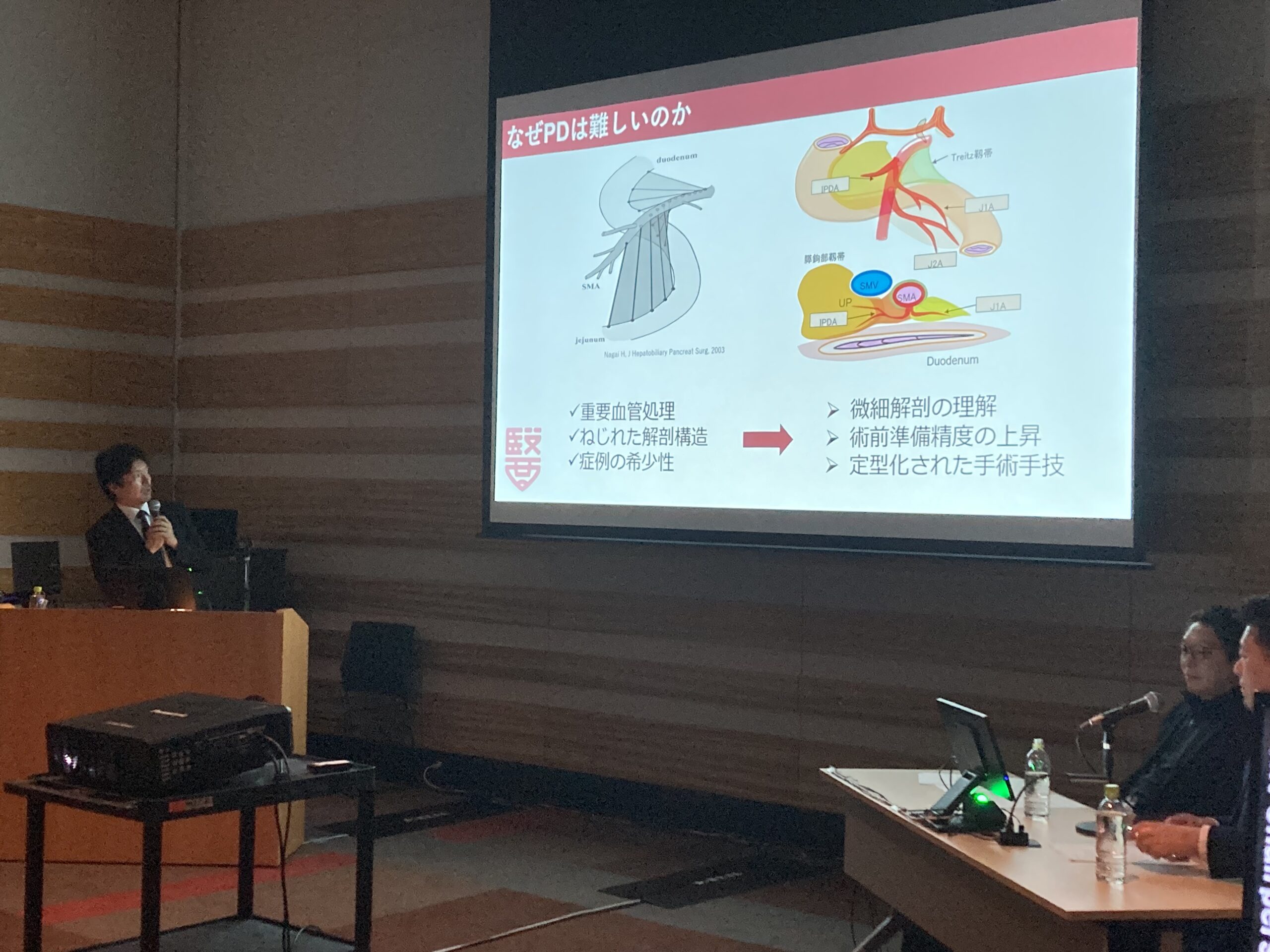
空間的ねじれの壁:大腸外科医にとってもSMV(上腸間膜静脈)やSMA(上腸間膜動脈)の露出・剥離は日常的ですが、それは「血管の前面を剥く」操作に留まります。対してPDでは、小腸を牽引し、十二指腸がSMAの下をくぐり抜けるような「立体的なねじれ構造」の裏側に入り込む必要があります。
複雑な血管分岐の壁:J1、J2、IPDA(下膵十二指腸動脈)、SMA2、SMA3、エリアC、エリアDなど、血管が複雑にねじれて立体交差しており、2DのCTスライス画像を何度見ても頭の中で立体として再構築することが非常に困難であったと振り返っています。
確信を持ってメスを進めるための「XRによる心理的障壁の克服」
修練の過程でHoloeyes MDを導入。ロボット支援手術の「3Dコンソール(ゴーグルを覗き込んで立体空間で操作する)」と「Holoeyesの3Dヘッドマウントディスプレイ」は極めて親和性が高いインターフェースであると指摘しています。事前にHoloeyes MDで裏側に回り込み、血管が何本、どの方角から、どれくらいの深さで分岐しているかを「直感的かつ体感的」に掴んでおいたことで、最も難易度の高いSMA周囲の神経叢剥離や、IPDAの血管処理において、心理的障壁が軽減され、確信を持って丁寧に剥離操作を進めることができたとのことです。
高度なロボット操作技術をすでに持ちながらも、解剖理解の壁に苦しむ他領域の熟練外科医にとって、XR技術はラーニングカーブの短縮に寄与し、高度技能手術の修得を支援するアセットとなり得ると結論づけています。
ディスカッション:XRの技術的限界と未来の展望
講演後のディスカッションでは、司会の井上先生、杉本先生、さらにフロアの先生方を交えて、XR技術の限界と未来の外科医療に関する議論が交わされました。
膵臓周囲の「脂肪」を3Dモデルで再現できるか?
フロアからの質問:肝臓は半透明にすることで中の脈管がよく見えるが、膵臓手術(PD)では血管が脂肪層の中に埋もれており、ロボット手術では脂肪の剥離が非常にやりにくい。脂肪層を3Dモデルで再現できないかとの質問がありました。
杉本先生の回答:CTデータから特定の領域を手書き(セグメンテーション)で脂肪層として抽出し、3Dモデルに表示することは技術的に可能です。しかし、変形や厚みの再現性において客観的な正確性を担保することが難しい場合、医療機器(クラスII)として診断・手術支援に用いる性質上、自動生成機能として標準提供するには臨床安全上の慎重な判断が必要であるとの見解が示されました。一方で、RAMPS(左側膵がんに対する広範囲遠隔膵脾切除術)などにおいて、術者がCTスライスから脂肪層を手動トレースして表示するアプローチは、術者個人の臨床的判断に基づく解剖理解の補助として有用性が高いことも共有されました。
空間コンピューティングによる「未来の外科手術環境」の展望
ディスカッションの後半では、空間コンピューティング技術が未来のロボット手術をどのように変革し得るかについて、将来展望が語られました。
ゴーグル内での手術操作という逆転の発想:「ロボットのコンソール画面にHoloeyesの3Dモデルを出す」のではなく、「空間コンピュータ(高機能ゴーグル)の中に、ロボットの術野カメラ映像を取り込んで表示させる」という逆転の発想が杉本先生から示されました。この技術的展望が実現すれば、外科医はロボットの狭いコンソールに顔を入れ込み首を痛める必要がなくなり、オープンでリラックスした姿勢で、高精細な3Dモデルと実際の術野映像を空中表示させながらコントロールする「次世代のロボット手術環境」が期待されます。ハンドジェスチャーによる直感的な操作や、手術チーム全体での同じ3D空間の共有など、将来の外科医療への期待が共有され、セミナーは盛況のうちに幕を閉じました。
まとめ
本セミナーでは、XR画像支援技術が臨床の補助、教育の効率化、および採用インパクトの創出など、多角的な場面で外科医療に寄与している現状が共有されました。
神人先生は、MST法とXRの融合による「術前シミュレーションに基づく的確なアプローチ」の実践を報告。
脊山先生は、空間認識の共有がもたらす「若手教育の効率化と採用インパクト」の実績を紹介。
笠原先生は、他領域からの転身における「解剖学的な心理的障壁の克服とラーニングカーブの短縮」の実体験を語りました。
3名の先生方の講演を通じて、XR技術が外科医の術前シミュレーションや空間認識の共有に寄与し、手術チーム全体の共通認識の形成を支援するツールとして活用が広がっていることが確認されています。

※ 販売名:医療用画像処理ソフトウェア Holoeyes MD (一般的名称:汎用画像診断装置ワークステーション用プログラム)、クラスⅡ(管理医療機器)、認証番号:302ADBZX00011000、認証日:令和2年2月28日
本件に関するお問い合わせ
セミナー内容、Holoeyes MDの導入、デモンストレーションのご依頼等に関するお問い合わせは、下記フォームよりお気軽にご連絡ください。
お問い合わせフォームはこちら